Release Notes
DISCOS 1.0
Discos-1.0 (Release Candidate) was released 2018 September the 12th
Remarks
This release is the result of a huge process that involved a large part of our code base in order to migrate the control software from a 32 bits to 64 bits platform. We now support CENTOS 6.8 64 bits and ACS-FEB1027. For a mere matter of manpower, we won’t be able to support older version any more.
We also migrate our repository from svn to github (DISCOS organization).
In parallel, in order to improve quality and reliability we introduced new concepts. Our development and bug fixing workflow is now TDD (Test Development Driven), also we developed a number of hardware simulator that, eventually, will drive us to a Continuous Integration approach. Moreover, in order to improve deployment we developed am automatic provisioning system based on ansible.
New features
SARDARA backend
The SARDARA backend integration has been further improved. A better error handling and configuration management has been put in place.The data marging is now completely automatic and quasi-realtime. Support for multi-feed, full stokes observations is now available (SRT only).
With respect to the previous release the configurations changed. This configurations have been tested only at the SRT and can be summarized as follows:
SK00, SK03, SK06, SK77, SC00, SL00, SP00 (L/R) SK00S, SK03S, SK06S, SK77S, SC00S, SL00S, SP00S (Full Stokes)
More details on the various configuration can be found in the user guide. The setSection command can be used to tune the configuration of the backend.
A system temperature (tsys command) is also available.
A new command getRms has been included in order to allows a better tuning of the input levels. More details on the guide.
The user interface for the SARDARA component is now available.
Typically the configuration of the roach backend is done by the schedules. Nevertheless it is possible to manually configure the backend with a sequence of commands:
> chooseBackend=SARDARA
> initialize=SK00
> integration=100
> setSection=
The setSection syntax follows the general rules:
> setSection=input,freq,bw,feed,pol,sr,bins
- where:
input: it could only be 0
freq: start frequency (MHz), placeholder * allowed
bw: band width (MHz), placeholder * allowed
feed: feed identifier, it cannot be changed, placeholder * allowed
pol: polarization, it cannot be changed, placeholder * allowed
sr: sample rate, it cannot be changed, placeholder * allowed
bins: number of frequency channels, it could be 1024 or 16384, placeholder * allowed
Section author: Carlo Migoni, Andrea Melis
IF Distributor for the SRT
The SRT has a new IFdistributor capable to perform down conversion and IF filtering.
The control of the local oscillator and the down conversion will be transparent with respect to the previous
release as the LPBandReceiver component can set it up as the other receivers.
It is possible to use the setLO command from the operator input console:
> receiversSetup=LLP
> setLO=2300
This new feature is only available using the L band feed (it is not
possible to set the local oscillator in the PPP configuration).
It is not allowed to set the LO inside the observed sky band. For instance:
> receiversMode=XXL5 # Bandwidth 1625:1715
> setLO=1650
Error - Value not allowed. It is within the band...
It is also not possible to set a receiver mode in case the current LO value is inside the mode band:
> receiversMode=XXL5 # Bandwidth 1625:1715
> setLO=1500 # Ok, it is outside the RF band
> receiversMode=XXL4 # Bandwidth 1300:1800
Error - Mode not allowed. The LO value is within the band...
The bandwith value is always positive, while the IFs could be negative, indicating that the IF band is inverted. For instance, in the following case:
> receiversMode=XXL5 # Bandwidth 1625:1715
> setLO=2300
the receiver panel will show startFreq=-675 and bandwidth=90.
In order to control the IF filtering the command ifd (SRT only) has been added. The available filters are:
FILTER ID |
Central Freq (MHz) |
Bandwidth (MHz) |
|---|---|---|
BW-NARROW |
576 |
115 |
BW-MEDIUM |
640 |
230 |
BW-WIDE |
768 |
460 |
BW-UNFILTERED |
see L-Band |
> ifd=filter
- where:
filter: it could be BW-NARROW,BW-MEDIUM,BW-WIDE,BW-UNFILTERED
Section author: Giuseppe Carboni, Andrea Orlati
System changes
FitsZilla fits file
The ‘’SECTION TABLE’’ a been extended by adding two additional columns ‘’frequency’’ and ‘’bandwidth’’. This data reports (in MHz) the effective start frequency and bandwidth of the bands sampled by the currently configured backend. Some keyword in summary.fits have now meaningful values (EXPTIME, LOGFILE ecc. for example). A more detailed list of this keywords can found in user documentation.
Section author: Andrea Orlati
Bootup procedure
The DISCOS bootup has been reviewed. The frontend is still acscommandcenter based but the ssh protocol is used instead of the acsdeamons. This should both improve the ease of use and speed up the completion of the process.
Section author: Andrea Orlati, Giuseppe Carboni
Change log
A change log of this release may be retrieved from this document
NURAGHE 0.6
Nuraghe-0.6 will be released on Friday 29 January 2016.
New features
SARDARAS backend integrated
The Roach component was integrated, even if some caveat must be taken into account.
The Roach backend is connected directly to the focus selector (total power backend) so bandwidth and signal level fed into the Roach are controlled through the total power component. For example the attenuation (command setAttenuation) of the Raoch component is binded to the TP.
There are 4 available configuration. Each configuration is specific for a single installed receiver. The following table shows the deafulat value for each setup:
Configuration |
FrontEnd |
Bandwidth |
TP bandwidth |
integration |
bins |
|---|---|---|---|---|---|
RK00 |
KKG |
1500MHz |
1250Mhz |
40 ms |
1024 |
RC00 |
CCB |
1500MHz |
1250MHz |
40 ms |
1024 |
RL00 |
LLP |
1500MHz |
2000MHz |
40 ms |
1024 |
RP00 |
PPP |
1500MHz |
2000MHz |
40 ms |
1024 |
A system temperature is also available. The measurment is relative to the bandwith portion selected by the setSection command.
The merging phase (the raw data coming from the roach are merged with the meta data coming from the telescope control system) is, temporarly, perfomed offline. At the end of the schedule a command _send_backend_command must be issued from a shell of the user workstation.
Typically the configuration of the roach backend is done by the schedules. Also it is possible to manullay configure the backenf to a sequence of commands:
> chooseBackend=Roach
> initialize=RK00
> integration=100
> setSection=
The setSection syntax follows the general rules:
> setSection=input,freq,bw,feed,pol,sr,bins
- where:
input: it could only be 0
freq: start frequency (MHz), placeholder * allowed
bw: band width (MHz), placeholder * allowed
feed: feed identifier, it cannot be changed, placeholder * allowed
pol: polarization, it cannot be changed, placeholder * allowed
sr: sample rate, it cannot be changed, placeholder * allowed
bins: number of frequency channels, it could be 1024 or 16384, placeholder * allowed
At present, the Roach component does not provide a user interface.
Acknowledgement to SARDARAS development team: Andrea Melis, Raimondo Concu, Alessio Trois.
Section author: Carlo Migoni, Andrea Melis, Marco Bartolini, Andrea Orlati.
Local Oscillator for the LP-band receiver
Now the LPBandReceiver component can set the local oscillator, so
the component behaves as the other receivers, and it is possible to use
the setLO command from the operator input console:
> receiversSetup=LLP
> setLO=2300
This new feature is only available using the L band feed (it is not
possible to set the local oscillator in the PPP configuration).
It is not allowed to set the LO inside the observed sky band. For instance:
> receiversMode=XXL5 # Bandwidth 1625:1715
> setLO=1650
Error - Value not allowed. It is within the band...
It is also not possible to set a receiver mode in case the current LO value is inside the mode band:
> receiversMode=XXL5 # Bandwidth 1625:1715
> setLO=1500 # Ok, it is outside the RF band
> receiversMode=XXL4 # Bandwidth 1300:1800
Error - Mode not allowed. The LO value is within the band...
The bandwith value is always positive, while the IFs could be negative, indicating that the IF band is inverted. For instance, in the following case:
> receiversMode=XXL5 # Bandwidth 1625:1715
> setLO=2300
the receiver panel will show startFreq=-675 and bandwidth=90.
A 1000MHz low pass filter is applyed to the IFs, so it is not possible to set a LO value that puts the IFs over the low pass filter:
> receiversMode=XXL4 # Band 1300:1800
> setLO=200 # IF band: 1100:1600
Error - Value not allowed. The IF bandwidth is outside the low pass filter.
Section author: Marco Buttu, Andrea Orlati, Sergio Poppi.
System changes
FitsZilla fits file
The “signal” keyword was added to the main header. Presently, three possible values are available:
* SIGNAL #indicating that the subscan was performed on-source
* REFERENCE # indicating the telescope was off-source during the subscan
* NONE # meaning the the keyword is unknown or the keyword is not pertinet
to the current subscan
Section author: Andrea Orlati, Simona Righini
Alias name for fully integrated backends
The command chooseBackend now allows the use of aliases for backends. Standard names continue to work regularly. The mnemonic names or aliases are the following:
Standard name |
Alias |
|---|---|
BACKENDS/TotalPower |
TotalPower |
BACKENDS/XBackends |
XArcos |
BACKENDS/Roach |
Roach |
Section author: Andrea Orlati.
Continuos calibration
In order to control the calibration mark from an external source (i.e. backends like the DFB or DBBC) the Total Power backend (focus selector) should be configured accordingly. The frontend also requires an identical configuration, this part has been addressed in previous release (see command externalCalOn). The command calSwitch, when the Total Power is the current backend, has been slightly modified. It now allows for the following sintax :
> calSwitch=N # where N is an integer value. One sample every N is acquired
with the noise cal turned on. This is the old behaviour of the Total
Power. It also disables the configuration EXT
> calSwitch=OFF # switches off all the previous setup and disables the
calibration mark control through the Total Power backend
> calSwitch=EXT # the mark will be controlled from external sources
(DBBC, DFB .....)
Section author: Andrea Orlati.
User Interface
The backend panel associated to the Total Power backend shows an extended status word. Four bits were added:
* ExternalMark # it turns yellow when the external mark control is enabled
* FastSwitching # it turns yellow when the total power is sampling with the
mark swicthing under its direct control. Note: only when the sampling
is active.
* Calon # it turns yellow when the noise mark is on (non-fast mode)
under the control of the Backend. This is not implemented yet.
* ZeroRef # it turns yellow when the backend inputs are connected to the
500hm. It may be yellow during a system temperature measurement.
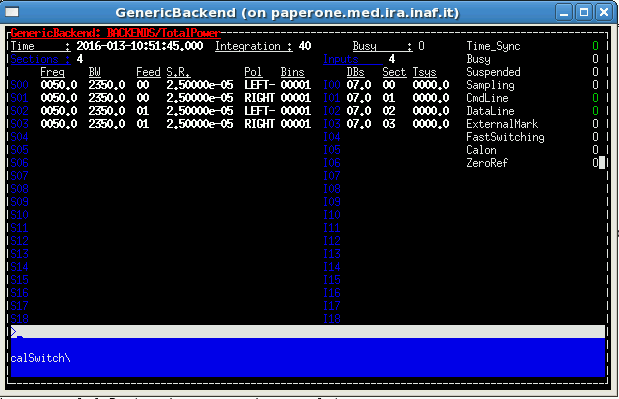
Figura 1: The Total Power console of Nuraghe 0.6
Section author: Andrea Orlati
Auto stow for wind
The telescope will be parked (and the running schedule stopped) if an excessive wind is detected.
Section author: Sergio Poppi
Change log
A complete and browsable change log of this release may be consulted from our tracking system.
NURAGHE 0.5
Nuraghe-0.5-RC (Release Candidate) will be released on Monday 22 June 2015. The release date of the stable version depends on the astronomer feedback, as explained in Release Candidate, so it is not yet decided.
New features
Dewar positioning
The DewarPositioner component is in charge of compensating the field rotation when dealing with multi-pixel receivers (if equipped with a derotation system). Details on supported modes, configurations and more precise information required when dealing with the derotation system are available here.
Section author: Marco Buttu, Andrea Orlati, Sergio Poppi, Simona Righini
K band derotator control
The derotation system installed with the K band receiever is now completely under control.
Section author: Marco Buttu
Frequency tracking
In order to fulfill the requirements for spectroscopy observations, the system can now keep a requested rest frequency in centre of the band of the backend (section). Both frontend and backend local oscillator could be tuned during this operation. This capability is now supported from both command line and schedule.
Section author: Andrea Orlati, Simona Righini
System changes
Continuous calibration
Some backends can quickly switch the calibration diode on and off (Total Power, DFB). Up to now this capability had to be enabled in the frontend control boards. From now on the operation is fully automated and does not require the human intervention any more.
Section author: Marco Buttu, Andrea Orlati
FitsZilla fits file
Some keywords added (mainly belonging to spectroscopy). In the output scan folder, when the scan is closed a summary.fits is created. The file contains just the main header with some keywords describing the current scan.
Section author: Andrea Orlati, Simona Righini
Minor servo system
Gregorian and BWG default configuration
When using the Gregorian or BWG focus only, the Antenna overall setup automatically configures the subreflector in order for the elevation to be tracked, and assumes the active surface is enabled. That means the minor servo setup automatically issues the following commands:
> setServoElevationTracking=ON
> setServoASConfiguration=ON
so they are not required any more. The user is asked to issue the correct configuration in case other behaviours are required.
Section author: Marco Buttu
LP band receiver setup
From now on, the LP setup procedure turns off the encoder of the PFP theta axis. That allows to eliminate the encoder RFIs when observing in L and P bands.
Section author: Marco Buttu
User interface
A few changes to the existing panels. Some parameters from the telescope, mainly
from the new features are now monitored, and the minor servo console reports
only four fields: Current Setup, Tracking, Status, and
Motion Info, as shown in Figure 1.

Figura 1: The new minor servo console of Nuraghe 0.5
Now the red color is only used in case of improper functioning, either when
the Status field indicates FAILURE or the minor servo system is
not Tracking the commanded position.
Section author: Marco Buttu, Andrea Orlati
Logging
The user commands from operator console are now logged. Logging system is now more robust. The management of the system log file is now more crafty, avoiding the creation of bigger log files. System log files are daily rotated and stored for 1 year.
Section author: Marco Bartolini, Antonietta Fara
Xarcos
Fully supported and integrated in the system. Integration time is now in milliseconds.
Section author: Carlo Migoni, Andrea Melis
Schedules
The schedule now allows to call parametric configuration procedures.
Section author: Marco Bartolini, Andrea Orlati
Testing Integration
The development framework now integrates tools for automatic tests development and execution.
Section author: Marco Bartolini
Build automation
The build process has been reorganized in order to have nightly builds and build status reports
Section author: Marco Bartolini
Change log
A complete and browsable change log of this release may be consulted from our tracking system.
ESCS 0.4
ESCS 0.4 was released March the 24th, 2016. The previuos version was released on October 2012 so this release contains lots of new updates and improvements coming from 3 years and a half of developments mainly driven by SRT requirements.
New features
Frequency tracking
In order to fulfill the requirements for spectroscopy observations, the system can now keep a requested rest frequency in centre of the band of the backend (section). Both frontend and backend local oscillator could be tuned during this operation. This capability is now supported from both command line and schedule.
Section author: Andrea Orlati, Simona Righini
Continuous calibration
TotalPower backend can quickly switch the calibration diode on and off (Total Power). This capabilities can also be exposed to other backends (DBBC) after a proper configuration. THis is now fully under software control.
Section author: Andrea Orlati
Xarcos
Fully supported and integrated in the system. Integration time is now in milliseconds.
Section author: Carlo Migoni, Andrea Melis
System changes
FitsZilla fits file
Some keywords added (mainly belonging to spectroscopy). In the output scan folder, when the scan is closed a summary.fits is created. The file contains just the main header with some keywords describing the current scan. The “signal” keyword was added to the main header. Presently, three possible values are available:
* SIGNAL #indicating that the subscan was performed on-source
* REFERENCE # indicating the telescope was off-source during the subscan
* NONE # meaning the the keyword is unknown or the keyword is not pertinet
to the current subscan
Section author: Andrea Orlati, Simona Righini
Alias name for fully integrated backends
The command chooseBackend now allows the use of aliases for backends. Standard names continue to work regularly. The mnemonic names or aliases are the following:
Standard name |
Alias |
|---|---|
BACKENDS/TotalPower |
TotalPower |
BACKENDS/XBackends |
XArcos |
Section author: Andrea Orlati.
User interface
The console will now present an additional panel (genericBackend) that shows the current configuration and status of XArcos.
Section author: Andrea Orlati
Manual Recording
The user now could manage a recording from the currently selected backend to the defualt data writer(see commands chooseBackend and chooseRecorder). Three new commands are now availble from the operatorInput:
> initRecording : prepares the data recording
> startRecording: starts the recording and file creation
> terminateScan: closes the scan
Section author: Andrea Orlati
Logging
The user commands from operator console are now logged. Logging system is now more robust. The management of the system log file is now more crafty, avoiding the creation of bigger log files. System log files are daily rotated and stored for 1 year.
Section author: Marco Bartolini, Antonietta Fara
Schedules
The schedule now allows to call parametric configuration procedures.
Section author: Marco Bartolini, Andrea Orlati
Testing Integration
The development framework now integrates tools for automatic tests development and execution.
Section author: Marco Bartolini
Build automation
The build process has been reorganized in order to have nightly builds and build status reports
Section author: Marco Bartolini
Change log
A complete and browsable change log of this release may be consulted from our tracking system.
ESCS 0.5
ESCS 0.5 was released by March, 2017. SVN release 1692. Some features are not fully completed. Their inclusion in the relase is meant to allow further testing and technical commissioning in sight of the final deployment of the capability.
New features
SARDARAS backend
The Roach component, able to control the SARADARAS backend, has been pre-released. Some caveats must be taken into account.
This version is directly derived from the SRT installation. Even though at the SRT is fully functional, at Medicina some more testings are required.
The Roach backend is connected directly to the focus selector (total power backend) so bandwidth and signal level fed into the Roach are controlled through the total power component. For example the attenuation (command setAttenuation) of the Raoch component is binded to the TP.
There are some available configurations. Each configuration is specific for a single installed receiver. More confugrations will be avilable when the commisisoning stage is over. The following table shows the deafulat value for each setup:
Configuration |
FrontEnd |
Bandwidth |
TP bandwidth |
integration |
bins |
|---|---|---|---|---|---|
RK00 |
KKC |
1500MHz |
1250Mhz |
40 ms |
1024 |
RC00 |
CCC |
1500MHz |
1250MHz |
40 ms |
1024 |
A system temperature is also available. The measurment is relative to the bandwith portion selected by the setSection command.
The merging phase (the raw data coming from the roach are merged with the meta data coming from the telescope control system) is perfomed almost real time so the user can check his data.
Typically the configuration of the roach backend is done by the schedules. Also it is possible to manullay configure the backenf to a sequence of commands:
> chooseBackend=Roach
> initialize=RK00
> integration=100
> setSection=
The setSection syntax follows the general rules:
> setSection=input,freq,bw,feed,pol,sr,bins
- where:
input: it could only be 0
freq: start frequency (MHz), placeholder * allowed
bw: band width (MHz), placeholder * allowed
feed: feed identifier, it cannot be changed, placeholder * allowed
pol: polarization, it cannot be changed, placeholder * allowed
sr: sample rate, it cannot be changed, placeholder * allowed
bins: number of frequency channels, it could be 1024 or 16384, placeholder * allowed
At present, the Roach component does not provide a user interface.
Acknowledgement to SARDARAS development team: Andrea Melis, Raimondo Concu, Alessio Trois.
Section author: Marco Bartolini, Carlo Migoni, Andrea Melis, Andrea Orlati.
7 GHz receiver
Observations with 7GHz receiver are now available. Information on the receiver can be found here.
The configuration can be enabled by typing the proper command:
> setupCHC
Other useful information follows:
Available bands: RF 5900-6300 MHz LO=5900, IF 100-500 MHz RF 6500-6900 MHz LO=6400, IF 100-500 MHz
The default configuration is the 6.7GHz one. Default bandwidth for the totalpower is 300 MHz, corresponding to this command:
In order to setup backend up: .. code-block:: discos
> initialize=CHC
Section author: Andrea Orlati
System changes
injectCommand
It is now available a program that allows to issue commands [RAL command] to the control system without directly accessing the operator input. Any authorized user (member of the system manager group) can use this command from its shell. The command accept just one argument, i.e. the RAL command to issue. It should be noted that a complex command should be included between “”.
> injectCommand [RALCommand]
Section author: Andrea Orlati
Support for long-term archive
The long-term archive requires an external tool to allow data and meta data collection (fits file, schedules and logs generated during the observation). The tool is called finalizer and is available under the DISCOS git oranization. The finalizer will run in the background and every duty cycle and it will:
check the if the lock file exists. if it exists exit, otherwise continue to following step
check if the are schedule repot files.
based on the content of each report file pack all required data in a tar file
copy the tarball in the sharable (with long-term archive) area
Generally the tarball produced by the finalizer should contains:
the schedule files
the corresponding log file
all the scans recorded during the schedule execution.
The information stored in the report are:
the location of the backup schedule files
the location of the corresponding log file
all the folder (scans) created during on execution of the schedule
Section author: Andrea Orlati
Minor Changes
XARCOS: added a new XK01 backend mode, solved a bug taht causes the system to crach on random basis
TotalPower: added calOn and calOff commands. At the moment these are only used in Noto installation
FTrack: fixed some bugs.
ReceiversBoss: new configuration takes into account the new control PC at Medicina station.
Scheduler: inserted support for integration of the finalizer.
Change log
A complete and browsable change log of this release may be consulted from our tracking system.
ESCS-Noto-0.2
ESCS-Noto, version 0.2 was released December the 2nd, 2016. This release was the evolution of the prototype installaed Febraury 2015 and contains lots of new updates and improvements. in order to have an overall view of capabilities and features, take a look at the release notes of the other production lines and respective user manuals.
New features
Weather station
The component to read weather parameters is now completed and stable.
Section author: Sergio Poppi
Calibration signal
The Phase calibration signal is now under control.
Section author: Andrea Orlati
Field System
Now the Field System for VLBI observation is a client application of DISCOS. Almost all required features should now be implemented by forwarding all Fully supported and integrated in the system. Some further tests should have been carried on.
Section author: Carlo Migoni
Active surface
The AS can now be direclty controlled with DISCOS. The low-level M&C is still delegated to the ASCU (ACtive Surface Control Unit). The available commands follow below:
command |
Result |
|---|---|
asOn |
Activate the AS tracking |
asPark |
park the acrive surface (all actuators are brought to hardware limit) |
asOff |
Bring the AS to 45° degrees of elevation |
Section author: Carlo Migoni
Subreflector
The subrelftor can now be direclty controlled with DISCOS. The low-level M&C is still delegated to the SCU (Subreflector Control Unit).
command |
Result |
|---|---|
TDB |
TDB |
Section author: Carlo Migoni
System changes
Change log
Not yet available